
- 4.2. Определение расчетных кинематических цепей станка
- 4.3. Определение расчетных перемещений конечных звеньев
- 4.4. Составление уравнения кинематического баланса цепи
- 4.5. Вывод формулы настройки расчетной кинематической
- 5. Пример анализа структуры и расчета настройки станка
- Задание
- 4.2. Определение расчетных кинематических цепей станка
- 4.3. Определение расчетных перемещений конечных звеньев
- 4.4. Составление уравнения кинематического баланса цепи
- 4.5. Вывод формулы настройки расчетной кинематической
- 5. Пример анализа структуры и расчета настройки станка
- Задание
- 5.2.1 Методика кинематической наладки
4.2. Определение расчетных кинематических цепей станка
Рекомендуется для обеспечения параметров каждого исполни-
тельного движения с учетом структуры станка определить органы и параметры настройки (см. п. 5).
Расчетные цепи должны обеспечивать частоту вращения шпинделя, подачу (скорость), величины перемещений и параметры траектории (в случае необходимости сложных движений). При этом каждая расчетная цепь может обеспечивать реализацию только определенного параметра исполнительного движения. При ее выборе необходимо обращать внимание на требуемую размерность настраиваемого параметра. С учетом этого для каждой цепи указываются ее конечные звенья.
4.3. Определение расчетных перемещений конечных звеньев
Расчетные перемещения конечных звеньев кинематической цепи определяются с учетом обеспечения настраиваемого параметра. При этом одно из расчетных перемещений принимается постоянным, а второе — соответствующим требуемому с учетом уточненных исходных данных (п. 4.1).
4.4. Составление уравнения кинематического баланса цепи
Данное уравнение составляется на основании предыдущего этапа с помощью структуры станка. При этом расчетное перемещение одного конечного звена цепи через ее передаточные отношения, включая органы настройки, согласовывается с расчетным перемещением второго конечного звена.
4.5. Вывод формулы настройки расчетной кинематической
цепи и определение особенностей расчета
Формула настройки определяется на основании уравнения кинематического баланса цепи. При этом передаточные отношения органов настройки выносятся в левую часть уравнения, а все остальное – в правую часть. В целом формула настройки представляет собой функцию настраиваемого передаточного отношения и (или) параметра движения одного конечного звена в зависимости от настраиваемого параметра второго конечного звена с учетом передаточных отношений постоянных участков цепи и характеристик ее элементов.
На данном этапе необходимо определить с какой степенью точности должен рассчитываться и обеспечиваться требуемый параметр настройки. При этом нужно сопоставить расчетные цепи с внутренними структурными связями. Если имеет место их совпадение (в случае обеспечения сложных исполнительных движений), то расчетные цепи должны настраиваться точно. Скоростные параметры движений могут настраиваться с допустимым приближением.
Необходимая точность расчета цепей, определяющих формообразующие движения исполнительных органов станка, должна определяться с учетом их влияния на точность размеров детали. Это относится также к обеспечению других движений, необходимых для обработки детали (движений врезания, деления, наладочных). Наибольшие отклонения перемещений должны быть в пределах третьей части от допускаемых отклонений размеров детали.
5. Пример анализа структуры и расчета настройки станка
Задание
Применительно к осуществлению заданного перехода обработки на станке с ЧПУ указанной модели выполнить анализ кинематической структуры формообразующей части станка и рассмотреть его кинематическую настройку.
Модель станка 16К20Т1, переход обработки – точение продольное наружной цилиндрической поверхности с обеспечением требуемых значений диаметра d (мм) и длины l (мм).
Источник
4.2. Определение расчетных кинематических цепей станка
Рекомендуется для обеспечения параметров каждого исполни-
тельного движения с учетом структуры станка определить органы и параметры настройки (см. п. 5).
Расчетные цепи должны обеспечивать частоту вращения шпинделя, подачу (скорость), величины перемещений и параметры траектории (в случае необходимости сложных движений). При этом каждая расчетная цепь может обеспечивать реализацию только определенного параметра исполнительного движения. При ее выборе необходимо обращать внимание на требуемую размерность настраиваемого параметра. С учетом этого для каждой цепи указываются ее конечные звенья.
4.3. Определение расчетных перемещений конечных звеньев
Расчетные перемещения конечных звеньев кинематической цепи определяются с учетом обеспечения настраиваемого параметра. При этом одно из расчетных перемещений принимается постоянным, а второе — соответствующим требуемому с учетом уточненных исходных данных (п. 4.1).
4.4. Составление уравнения кинематического баланса цепи
Данное уравнение составляется на основании предыдущего этапа с помощью структуры станка. При этом расчетное перемещение одного конечного звена цепи через ее передаточные отношения, включая органы настройки, согласовывается с расчетным перемещением второго конечного звена.
4.5. Вывод формулы настройки расчетной кинематической
цепи и определение особенностей расчета
Формула настройки определяется на основании уравнения кинематического баланса цепи. При этом передаточные отношения органов настройки выносятся в левую часть уравнения, а все остальное – в правую часть. В целом формула настройки представляет собой функцию настраиваемого передаточного отношения и (или) параметра движения одного конечного звена в зависимости от настраиваемого параметра второго конечного звена с учетом передаточных отношений постоянных участков цепи и характеристик ее элементов.
На данном этапе необходимо определить с какой степенью точности должен рассчитываться и обеспечиваться требуемый параметр настройки. При этом нужно сопоставить расчетные цепи с внутренними структурными связями. Если имеет место их совпадение (в случае обеспечения сложных исполнительных движений), то расчетные цепи должны настраиваться точно. Скоростные параметры движений могут настраиваться с допустимым приближением.
Необходимая точность расчета цепей, определяющих формообразующие движения исполнительных органов станка, должна определяться с учетом их влияния на точность размеров детали. Это относится также к обеспечению других движений, необходимых для обработки детали (движений врезания, деления, наладочных). Наибольшие отклонения перемещений должны быть в пределах третьей части от допускаемых отклонений размеров детали.
5. Пример анализа структуры и расчета настройки станка
Задание
Применительно к осуществлению заданного перехода обработки на станке с ЧПУ указанной модели выполнить анализ кинематической структуры формообразующей части станка и рассмотреть его кинематическую настройку.
Модель станка 16К20Т1, переход обработки – точение продольное наружной цилиндрической поверхности с обеспечением требуемых значений диаметра d (мм) и длины l (мм).
Источник
5.2.1 Методика кинематической наладки
Кинематическая наладка станка заключается в согласовании движений исполнительных органов. Методика наладки одинакова для большинства станков и не зависит от их сложности. Для примера рассмотрим наладку токарно-винторезного станка на нарезание резьбы (рис. 5.2). Чтобы нарезать резьбу на заготовке 1, необходимо сообщить суппорту 3 с резцом 2 продольную подачу вдоль оси заготовки, согласованную с частотой вращения шпинделя 5. Следовательно, нужно рассчитать две кинематические цепи: скоростную (цепь главного движения) и нарезания резьбы. В обоих случаях следует составить уравнения кинематического баланса, связывающие расчетные перемещения конечных элементов кинематической цепи.
Рассмотрим кинематическую цепь главного движения. Шпиндель 5 с заготовкой 1 получает вращение от электродвигателя через ременную передачу и три пары зубчатых колес. Частоту вращения (мин -1 ) шпинделя рассчитывают по формуле
где v — скорость резания, м/мин (выбирается по справочнику режимов резания): d — диаметр заготовки, мм.
Составим уравнение кинематической цепи от электродвигателя к шпинделю при условии, что шпиндель должен вращаться с частотой

где n — частота вращения вала электродвигателя, мин -1 ; 0,985 — коэффициент, учитывающий скольжение ремня.
Это уравнение можно представить и в общем виде:
где iпост — постоянное передаточное отношение, характеризующее цепь; iсм — сменное передаточное отношение механизма наладки.
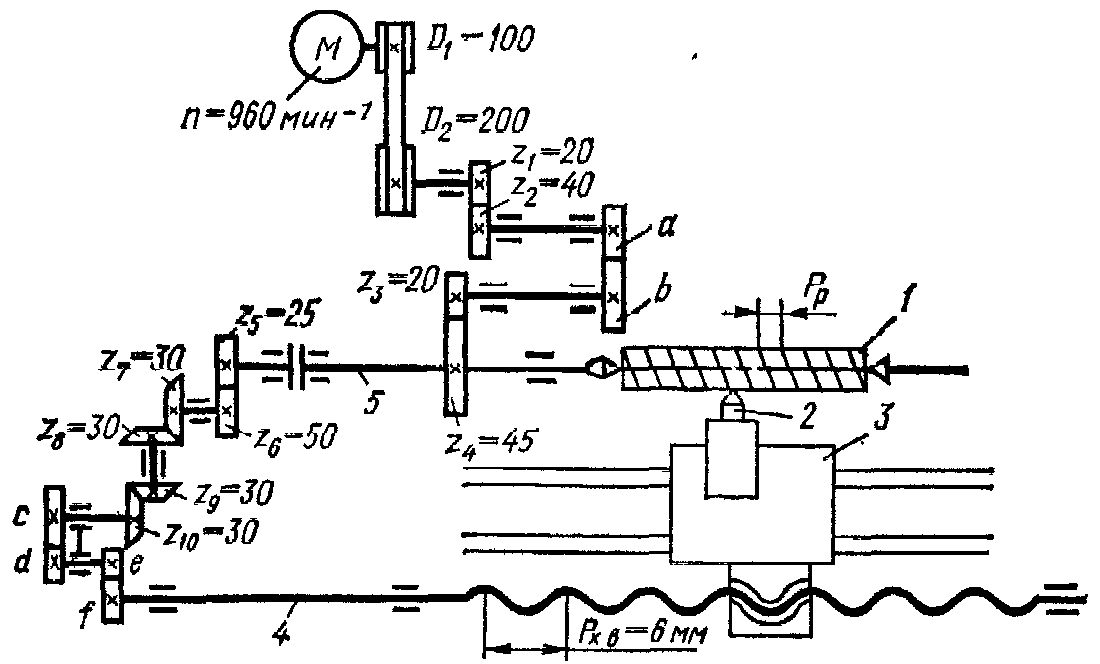
Рис. 5.2. Кинематическая схема токарно-винторезного станка
В рассматриваемой кинематической цепи известны все величины, за исключением сменных колес а — b, являющихся механизмом наладки. Подставив численные значения, получим
 откуда a / b = nшп / 105.
откуда a / b = nшп / 105.
Так как nшп = 1000v / (πd), определим значение iсм = а / b; определим колеса а и b и тем самым произведем наладку цепи главного движения. Затем приступим к наладке кинематической цепи движения подачи (или цепи нарезания резьбы). Резец 2, укрепленный на суппорте 3, получает перемещение от ходового винта 4, который приводится во вращение от шпинделя 5 через пару цилиндрических колес, две пары конических колес и сменные зубчатые колеса с — d, e — f (см. рис. 5.2).
Составим уравнение кинематического баланса исходя из условия, что за один оборот шпинделя резец переместится вдоль оси заготовки на величину шага Рр нарезаемой резьбы:
 .
.
В общем виде это уравнение будет выглядеть следующим образом:
1об.шп. iпост iсм Рх.в = Рр , откуда  ,
,
где Рр — шаг нарезаемой резьбы; Рх.в — шаг ходового винта.
 , откуда
, откуда  .
.
Подобрав сменные колеса с — d, е — f, произведем наладку цепи движения подачи. При кинематической наладке станков необходимо: 1) выяснить характер движения рабочих органов и их согласованность; 2) выявить все кинематические цепи станка; 3) составить уравнения кинематических цепей, связывающих попарно рабочие органы станка; 4) определить передаточные отношения механизма наладки и подобрать в соответствии с ними сменные зубчатые колеса или другие элементы наладки.
Источник